
医療用肩および肘CPMリハビリ機器


医療用肩肘関節CPMリハビリ機器 リハビリセンターで広く使用されています, 自宅と病院, 肩肘関節リハビリ運動を行う患者さんに役立ちます.
- 説明
- 問い合わせ
説明
リハビリテーションセンターの肩と肘のCPMリハビリテーションマシン

リハビリテーションセンターの肩と肘のCPMリハビリテーションマシン
タイプ: リハビリ機器
製品の技術的特徴
肩と肘の関節のCPMは新しく設計された医療です
機器製品, 製品の主な技術的特徴は次のとおりです:
1. 特別に設計されたモータードライブ, 着実に走る, 低ノイズ, と長寿命.
2. マイコンデジタル制御設計と輸入統合も採用
部品, 大量のインポートされたCPUとインテリジェントなプログラム設計, the
機械には過負荷保護の機能もあります.
3. 大画面液晶ディスプレイ, すべてのパラメータを明確に読み取ることができます.
4. 医学的治療の必要性を考慮して, 動作範囲が広い.
5. 最適化された構造設計.
主な構造
このマシンはホストコンピュータで構成されています, 支柱, レザー
クッション, ハンドコントローラー, 等々.
主な機能パラメータは次のとおりです:
1.スタンドの長さは50mm以下で調整できます.
2.関節の角度動作範囲:0°—150°;
3.角度動作速度範囲: 0.5°—3.5°/秒;
4.電源: 220Vac±22Vac,50±1Hz;
5.力: ≤60W
ユニットの適応
このユニットは、肩と肘の関節の回復に使用されます
骨折.
本機は関節の動作角度を調整できます, それは促進することができます
肩関節の回復期.
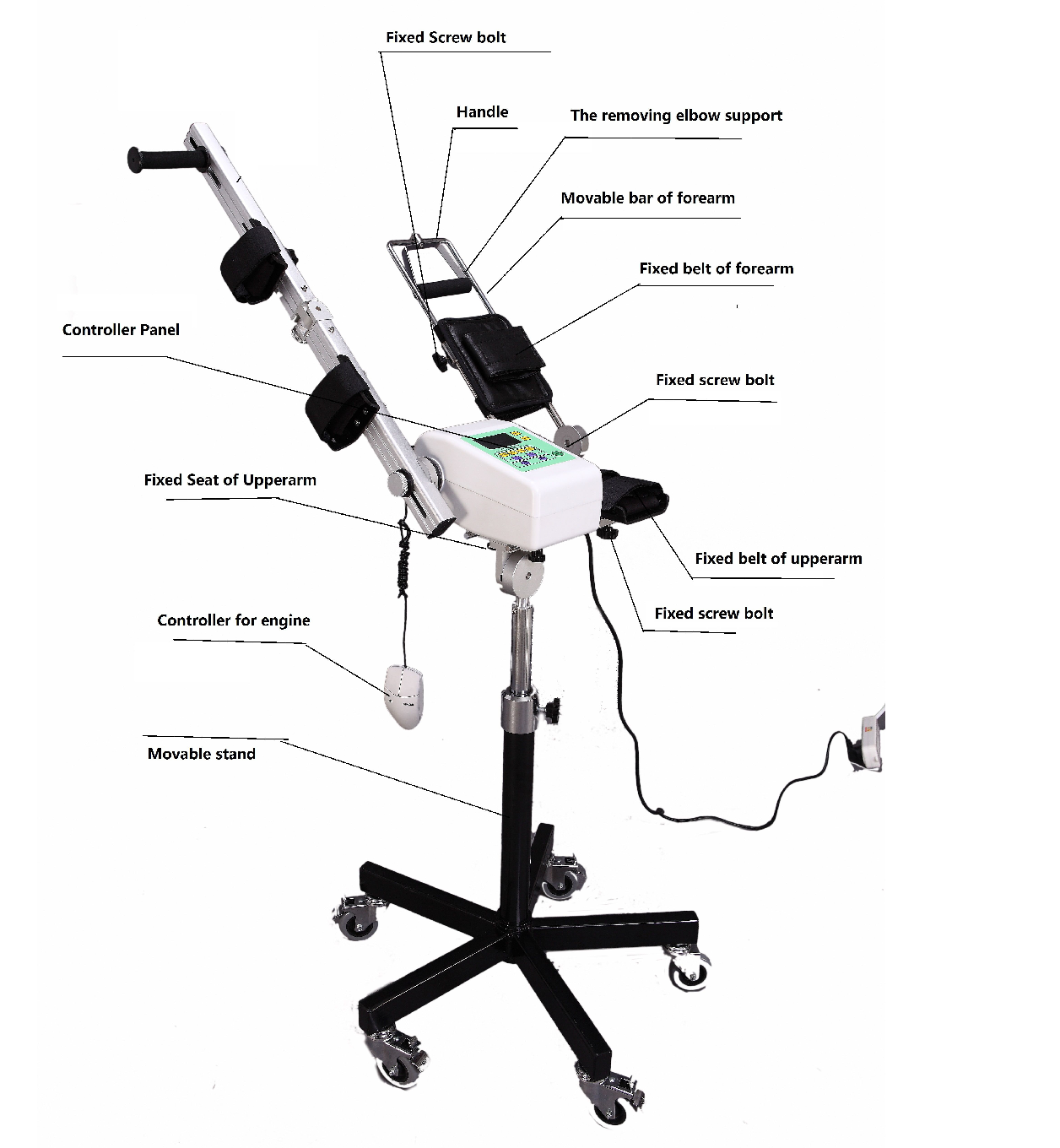
肩と肘の関節肘関節のスケッチマップ
(左腕の状態)
肘関節の操作方法
この部分は、右または左の肘関節に使用されます.
1.電源を接続します, スイッチをオンにします, ディスプレイに設定が表示されます
前回のデータ, 患者はユーザーの状態に応じてすべてのデータを設定できます.
2. 延長角度を設定する 、屈曲角度、速度、状態に応じた時間
患者の. 対応するキーを押します, マシンのパラメータが表示されます.
そして、設定指が点滅します, 押すことができます増加または
データを減らす. そしてもう一度押す, 指の点滅が止まります.
3.正しいすべてのデータを確認してください,開始/一時停止を押して開始します
機械,その後、マシンは一致した設定データを実行します。マシンの場合
通常の状態で実行でき、設定データは患者の要件に適合します.
機械を停止します , ポールの長さを調整し、それに応じてベルトを固定します
スケッチ. ボルトを締める. データをリセットする場合, マシンを停止してリセットできます
データを入力して、やり直してください。。
4.低速で2サイクル実行します, に適した設定データを確認する
再びパティオントの状態, その後、患者への治療を開始します.
5. 制御モードには3つのタイプがあります: 正常, 角度と速度モード; the
通常モードは、マシンが設定データに従って動作していることを示します. の
角度モードは、屈曲角度が3°増加する可能性があることを示しています,それぞれの後に
15実行時間は約20分; 速度モードは、速度が1レベル追加することを示します
15〜20分ごとに.
6.機械にはモーメントの機能があります; 「大きな」瞬間は
モーターワーク 100% 電力出力. モーメント「中央」は、
65% 電力出力, 「小さい」瞬間は、 35% 電力出力.
設定モーメントを超える場合 (モーターの出力), マシンはで実行されます
患者を保護するための逆方向.
7.ハンドコントローラーは主に患者を十分に保護するために使用されます。
マシンは実行を停止します , スタート/リターンを押すと、マシンが実行を開始します
もう一度押すと、機械は逆方向に動きます.
ご注意ください:
a。機械の制御方法と機械の緊急停止をユーザーに伝えてください,で
そこにある場合はユーザーに傷をもたらすでしょう.
b. 固定ベルトの位置について, 前腕と上腕でコンバーチブル
ユーザー, 硬化中はボルトを締めてください.
c. 硬化時間を終えたら, 他の人の助けを借りて操作を終了してください , ユーザーがバランスを崩した場合.
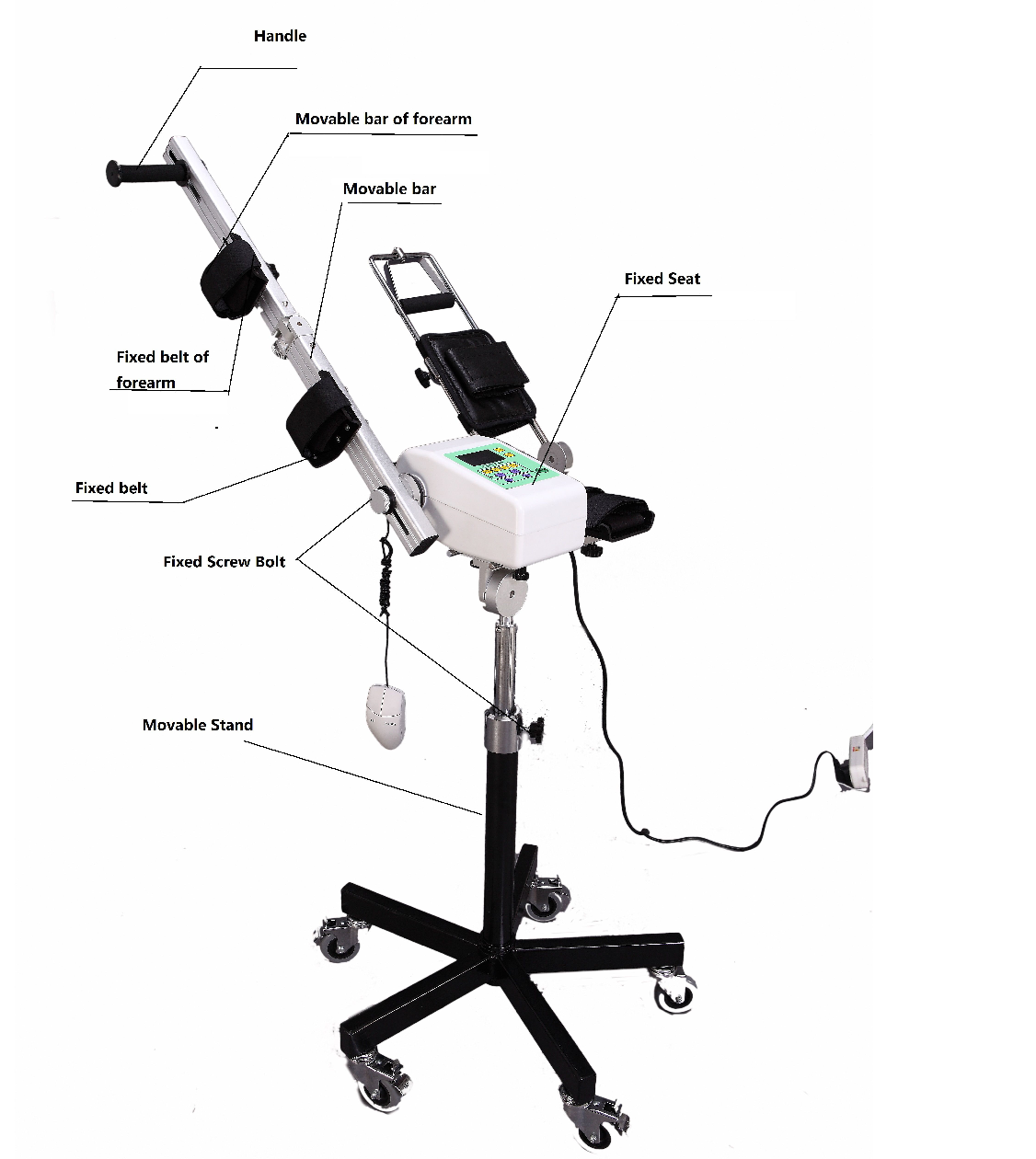
肩と肘の関節肩関節のスケッチマップ
(右腕の状態)
肘関節の操作方法
この部分は右腕または左腕に使用されます.
1.電源を接続します, スイッチをオンにします, ディスプレイに設定が表示されます
前回のデータ, 患者はユーザーの状態に応じてすべてのデータを設定できます.
2. 延長角度を設定する 、屈曲角度、速度、状態に応じた時間
患者の. 対応するキーを押します, マシンのパラメータが表示されます.
そして、設定指が点滅します, 押すことができます増加または
データを減らす. そしてもう一度押す, 指の点滅が止まります.
3.正しいすべてのデータを確認してください,開始/一時停止を押して開始します
機械,その後、マシンは一致した設定データを実行します。マシンの場合
通常の状態で実行でき、設定データは患者の要件に適合します.
機械を停止します , ポールの長さを調整し、それに応じてベルトを固定します
スケッチ. ボルトを締める. データをリセットする場合, マシンを停止してリセットできます
データを入力して、やり直してください。。
4.低速で2サイクル実行します, に適した設定データを確認する
再びパティオントの状態, その後、患者への治療を開始します.
5. 制御モードには3つのタイプがあります: 正常, 角度と速度モード; the
通常モードは、マシンが設定データに従って動作していることを示します. の
角度モードは、屈曲角度が3°増加する可能性があることを示しています,それぞれの後に
15実行時間は約20分; 速度モードは、速度が1レベル追加することを示します
15〜20分ごとに.
6.機械にはモーメントの機能があります; 「大きな」瞬間は
モーターワーク 100% 電力出力. モーメント「中央」は、
65% 電力出力, 「小さい」瞬間は、 35% 電力出力.
設定モーメントを超える場合 (モーターの出力), マシンはで実行されます
患者を保護するための逆方向.
7.ハンドコントローラーは主に患者を十分に保護するために使用されます。
マシンは実行を停止します , スタート/リターンを押すと、マシンが実行を開始します
もう一度押すと、機械は逆方向に動きます.
ご注意ください:
a。機械の制御方法と機械の緊急停止をユーザーに伝えてください,で
そこにある場合はユーザーに傷をもたらすでしょう.
b. 固定ベルトの位置について, 前腕と上腕でコンバーチブル
ユーザー, 硬化中はボルトを締めてください.
c. 硬化時間を終えたら, 他の人の助けを借りて操作を終了してください , で
ユーザーがバランスを崩した場合.
| タイプ | リハビリ器具 |
| 商品名 | 医療用肩肘関節CPMマシン |
| 関数 | 肩肘関節リハビリ訓練に使用 |
| 応用 | リハビリテーションセンター, 病院, 診療所 |
| 材料 | 鉄骨, 鋼 |
| MOQ | 1 個 |
理学療法機器
歩行リハビリ
上肢リハビリテーション
下肢リハビリテーション
全身リハビリ
子供のリハビリテーション
指のリハビリ
CPMシリーズ
治療台シリーズ
腰と首の牽引ベッド
医療用マスク
関連製品
-
医療用肩CPMリハビリ機器
医療用肩CPMリハビリ機器 リハビリセンターで広く使用されています, 自宅と病院, 肩関節リハビリ運動をする患者を助ける.
-
医療用肘関節CPMリハビリテーションマシン
医療用肘関節CPMリハビリ機器 リハビリセンターで広く使用されています, 自宅と病院, 肘関節リハビリ運動をしている患者を助けます.
-
医療用指関節CPMリハビリ機器
医療用指関節CPMリハビリ機器 リハビリセンターで広く使用されています, 自宅と病院, 指関節リハビリ運動を行う患者を助けます.
-
医療先進アクティブパッシブリハビリテーション膝CPM
医療用膝CPMリハビリ機器 リハビリセンターで広く使用されています, 自宅と病院, 膝関節リハビリ運動を行う患者を支援します.
-
医療用足首関節CPMリハビリ機器
医療用足首関節CPMリハビリ機器 リハビリセンターで広く使用されています, 自宅と病院, 足首関節リハビリ運動を行う患者を助けます.





